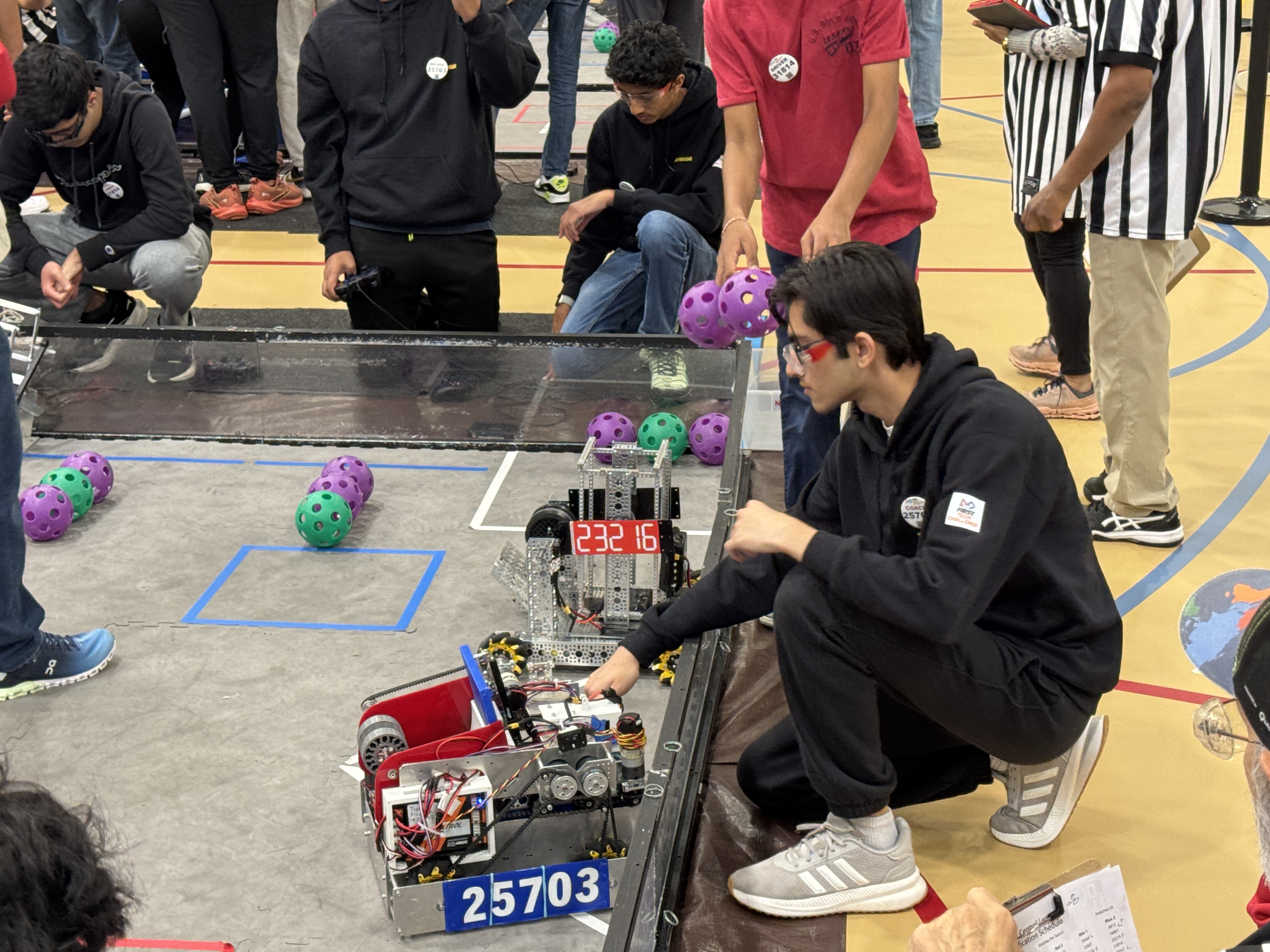
1. FIRST Tech Challenge – Robotics
Team Captain (11th Grade), Programming Lead (10th Grade)
Serving in dual leadership roles on a 14-member FIRST Tech Challenge team, I balanced technical direction with team management. As the programming lead, I designed our robot’s codebase with modularity and testability in mind. This made it easy for team members to debug, update, and hand off code as the season went on. This structure let us quickly make changes during the competition and adjust to mechanical changes without having to rewrite whole systems.
As captain, I had to think about more than just the technical aspects. I tried to create a team culture where everyone felt responsible for their work. This made it easier for our mechanical, electrical, and programming subgroups to talk to each other and keep development on track. Strategic decision-making became a daily task, whether it was deciding how to use limited build time, which features to focus on for competition, or how to deal with the problems that come with robotics.
This experience taught me that strong ideas only become reality when a team operates with shared purpose and clear structure. Leading Team Nuclear showed me how to provide both.
Key Achievements:
- Inspire Award Finalist
- Winning Alliance Captain
- Developed advanced autonomous routines using IMU and road-runner path planning.
Technologies:
- Java
- FTC SDK
- Limelight 3a
- AprilTag v3
- Roadrunner



NASA Human Exploration Rover Challenge – Team Orion – SoulPhamm
Team Lead – Electric Systems Engineer – One of 9 teams selected Internationally for the Highschool RC Division.
I am leading a 12 member high school engineering team in designing, building, and programing, a remote-controlled rover for the NASA Human Exploration Rover Challenge. We were selected as one of 9 high school RC-Division Teams globally.
My role spans both strategic leadership and technical work, specialized in creating integrated systems that handle various sensors, communication protocols, and control boards. Working with the Teensy 4.1, we obtain live telemetry from our rover from each run, carry out various tasks including testing soil moisture, water Ph, and air quality, and control the drivetrain of our rover.
I established a clear organizational structure, forming dedicated sub teams for design, programming, safety, and outreach. I have also lead the creation of several written deliverable that we submit to NASA’s HERC Committee, including the proposal which granted us entrance into this competition.
My goal is not simply to compete, but to engineer a rover that reflects the full potential of what our team can accomplish when given a challenge worth solving.
Technologies:
– Teensy 4.1
– Arduino Code
– Digital and Analog Protocols
– Onshape
– Simscale


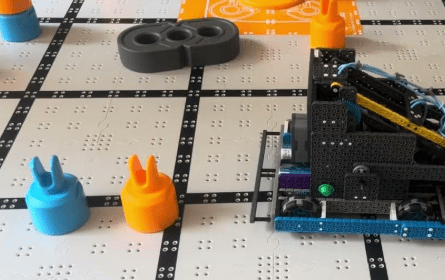
VEX IQ Youth Mentor – Internship
VEXIQ Youth Mentor
My work as a VEX IQ youth mentor has been a formative experience in teaching, technical communication, and leadership. I guide elementary and middle school students through the process of designing, building, and programming competition-ready robots, breaking complex concepts into steps they can own. Along the way, I focus on building their confidence and problem-solving mindset—asking questions instead of giving answers, and helping them learn to think like engineers, not just follow instructions.
Skills used: Python programming · Technical communication · Mentoring & leadership